从表面上看,轰轰烈烈的智驾推广活动似乎在 2024 年的春天里“偃旗息鼓”,除了年初的华为问界和小鹏宣布“全国开城”外,其他品牌鲜有跟进。大多数具备智驾能力的车企最主力的场景依然是高速高架,城区高阶智驾大概率要等到下半年,甚至跳票。
不开通城区智驾,难道是这些车企不想吗?最大的原因恐怕还是技术限制。城区道路场景中交通参与者更加复杂,系统需要在短时间内识别、判断、响应,如果某些环节出错,则可能带来严重后果。

话虽如此,随着小米等最后一批新能源玩家的入局和行业对智能化的重视,智驾必定会成为新能源市场竞争最惨烈的阵地。极越在 AI Day 上表示“2024 年不支持全国都能开智驾的车企会掉队”,不断开城乃至“全国都能用”,将会成为车企智驾竞争的关键所在。
剧情来到“八仙过海”,接下来自然是“各显神通”。
有无激光雷达不再重要
智驾行业中两个最主要的分歧,一个是纯视觉方案还是借助激光雷达等传感器,另一个则是“有图无图”,也就是是否需要高精地图。技术路线的争论在各行各业中一直存在,不过对智驾来说最终目标还是覆盖更多的场景、提供更好的体验,至于具体的路线方案争论倒是可以放到一边。
以感知技术路线这一点来说,目前最主流,也是绝大多数的车企都会借助激光雷达的能力来实现高阶智驾,当然其中也有“异类”,比如特斯拉和极越。特斯拉固然是坚定的纯视觉方案支持者,背靠的是强大的 AI 能力和领先的智驾算法,极越的情况也颇为类似。
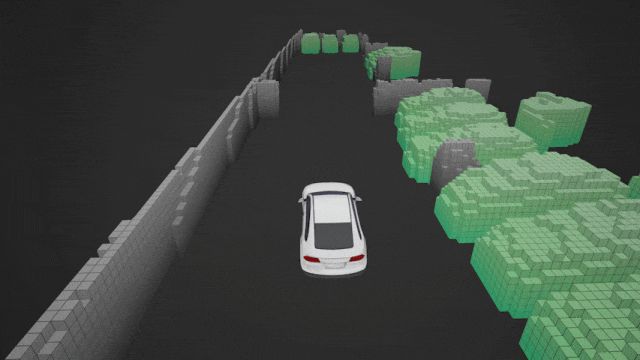
在日前举行的 AI Day 上极越针对智驾场景带来两个信息,第一个是国内首个纯视觉方案的 OCC 占据网络已经完成升级,并逐渐形成“B.O.T”技术体系。所谓“B.O.T”,实际上就是集合了 BEV 鸟瞰视角感知、OCC 占据网络和 Transformer 神经网络算法模型的技术体系,虽说在其他车企中都是些相对主流且不陌生的技术,但毕竟极越要把这些技术点应用到纯视觉方案中,难度自然更高一些。
主要还是看效果,极越之前的 OTA V1.3.0 版本就已经带来了所谓的“直觉避障”功能,这一次 AI Day 再次宣布给智驾系统带来全新的 Apollo 自动驾驶视觉大模型(VTA),进一步提升了静态检测、时序跟踪、实时建图等能力,针对 OCC 占用网络等技术点也做了针对性的升级。
对比带激光雷达的智驾方案,纯视觉最大的问题在于对光线和画面对比度的依赖,简单来说光线不足的场景识别能力差,而当前物体形状不规则或者有重合,同样会降低识别能力。
想要克服这些短板,现在主流的方案就是借助 AI 算法不断地进行自我学习,通过喂养大量的数据不断提升视觉系统的识别精准度。但如果按照传统的做法,光是数据的筛选、清洗和分类就消耗大量的时间和人力成本,而且数据生产的效率完全跟不上智驾行业发展的速度。

针对这些传统难题,极越给出的答题思路和特斯拉类似,那就是请来“AI 大模型”。具体的细节我们不过多赘述,简单地说极越从智驾数据生产的环节起就引入了 AI 大模型的能力,而视觉智驾算法的训练同样利用 AI 大模型提高效率,所以才能在短时间内让视觉识别的精准度提升,和获得一定的逻辑推理能力。
有趣的一点是,极越在训练 OCC 占据网络的时候会利用不同测距的激光雷达来收集、生成对应场景信息,也算是从另一个角度解读了“有无激光雷达之争”。
理论上极越的技术优势是有了,问题还是在用户认知上。站在消费者角度他们不一定会过于关注技术的实现应用了什么方案,而是最终效果如何,体验上能否“遥遥领先”。目前有关极越智驾能力的反馈还不足以形成行业影响力,而且极越的技术路线几乎没有其他车企可以模仿(对百度 AI 的能力依赖过于严重),唯一可以证明自己的机会,就只有等待特斯拉 FSD 入华,然后正面击败他们了。
低算力方案日益成熟
值得注意的是,极越的智驾方案除了拿掉激光雷达,下一步还会进一步摆脱对高精地图的依赖。他们和百度一起研究出了一个折中的方案,借助智驾车型上的传感器采集道路数据,然后生成介于高清地图和标清地图之间的“LD 地图”,用以实现车道级导航和全场景智驾。
尽管同时拿掉激光雷达和高清地图,但极越的纯视觉智驾方案未必会是大家理想中的“低成本智驾”,毕竟背后还得依靠和百度地图深度合作这层关系。要说真正的低成本智驾,相信还是大疆车载在不久前公布的“成行平台”,它的出现让我们见到了全场景智驾能力向 10 万元档车型普及的可能性。
大疆车载的“成行平台”最大的特点是两低:对传感器的要求低,和对算力的要求低。以目前已经量产的基础平台“7V+32TOPS”为例,其含义为仅需要 7 颗摄像头和 32TOPS 的平台算力就能实现 L2+ 智驾,而更高阶的平台,比如“7V+100TOPS”则可以摆脱激光雷达和高精地图实现全场景智驾。
都是纯视觉的智驾方案,都不依赖高精地图,大疆成行平台相比极越的智驾方案优势在于不和个别地图供应商深度绑定,而且他们的识别算法、建图算法更多是平台本身解决,极越那边则是依托百度的 AI 能力。
大疆车载公众号通过科普文章详细介绍了成行平台的一些技术细节,我们可以从中了解到成行平台能够实现低硬件、低算力智驾的关键所在。
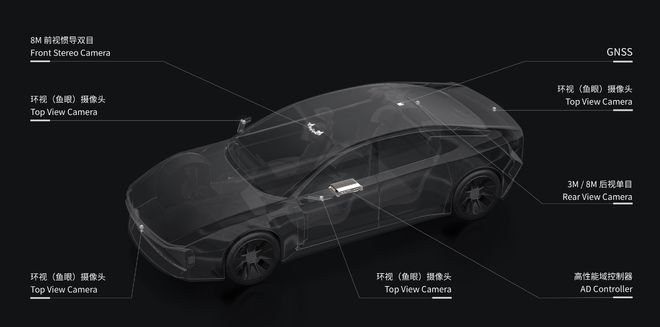
首先是感知硬件,整套系统无需使用激光雷达甚至毫米波雷达也能实现完整智驾功能是特色所在,不过他们也有自己的特色硬件,那就是鱼眼相机来构成“双目视觉”,其原理非常简单,那就是模仿生物的双目定位特征,让摄像头生成的点云图也具有深度特性,在一定程度上替代了激光雷达的作用。
当平台升级,也就是基于 100TOPS 的算力,成行平台可以将双目 BEV 方案升级为 Transformer 架构以提升检测范围,但根本原理并没有改变。
然后是地图相关,成行平台不依赖高清地图,但也不意味着普通的标清地图就能满足需求。和极越的方案差不多,大疆和图商合作定制了“智驾地图”,地图的分辨率、覆盖率、更新频率和成本处于高清地图和标清地图之间,取得了一定的平衡。
至于地图实在是覆盖不到地方,大疆也有自己的一套地图拓扑模型,能够联想、推断道路之间的逻辑关系,从而实现预反应。举个例子,一般的车道线模型“看见什么就是什么”,而利用拓扑模型可以产生场景因素之间的关联性推断,见到路口会考虑是否可能有行人穿过,有物体遮挡也能根据当前元素(比如延伸的车道线、护栏等)推断出被遮挡后可能存在的情况。
综合来说,大疆车载成行平台可以用相对少的感知硬件和低性能算力来实现全场景智驾,靠的还是技术实现的创新。这给行业带来的另一种思路是,做智驾不一定只有算力的“大力出奇迹”这一条路,只要软硬件搭配得到,也能达到类似体验。
不过客观来说,低成本方案也有低成本方案的缺点,激光雷达等元器件在复杂场景中的感知能力依然无法代替,而高算力平台带来的算力冗余价值也不容忽视。归根到底,大疆车载的成行平台还是面向入门车型为主,主要的价值是向下普及智驾,而目标客户主要还是以传统自主品牌,那些没有足够实力全栈自研智驾的车企。
同样的,大疆车载的智驾方案面临的问题和极越一样,还缺乏足够的市场认可度。另一方面,智驾能力的高低也和用户数据量有关,这是极越和大疆都无法顺利解决的棘手问题。从好的角度来看,行业中出现了越来越多的,基于纯视觉和无高精地图的技术方案,不光是实现成本的进一步降低,还有技术的多样性,都能直接推动“全国都能开”变为现实。
至少在“窗口期”来临之际,急于上车的车企们也有了全栈自研之外的备选方案。
普及高阶智驾没有借口
一个小插曲,最近马斯克也遇到了 FSD 的普及难题。简单来说,FSD 在北美的选装率下降让马斯克大为不满,他认为这是销售或者说特斯拉整体的销售策略出了问题,没能让广大消费者认识到 FSD 的优秀体验。
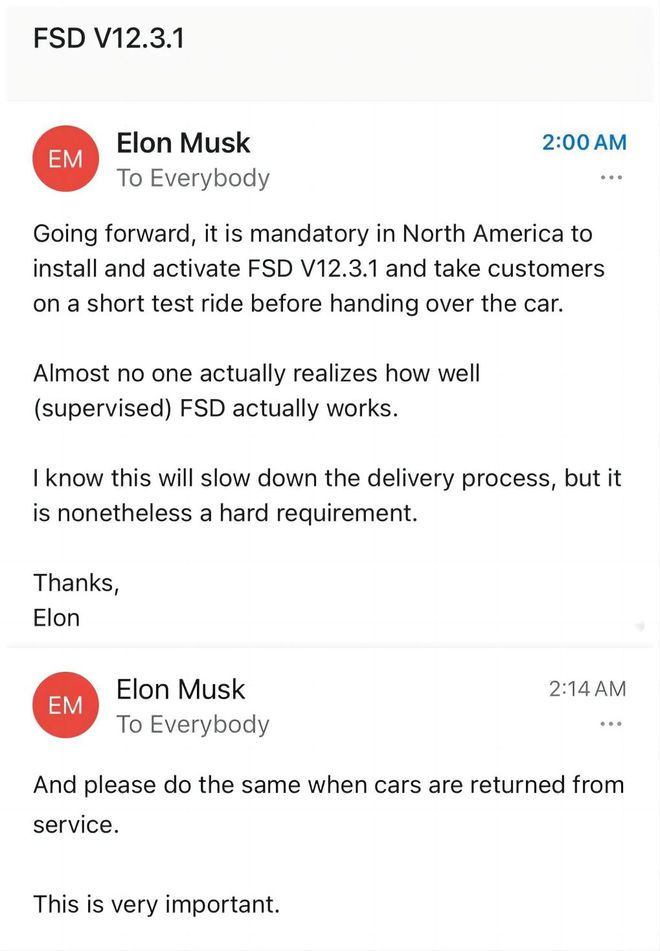
对应的解决方案有两个,首先是要求试驾车必须开通 FSD,且销售在试车环节要让客户体验 FSD,马斯克认为这虽然会拖慢交付的节奏,但 FSD 的开通率应该会有提升;第二个办法是向车主发放一个月的 FSD 免费试用机会。
中国的新能源车同行们解决这个问题的难度相对要低,首先中国新能源车企提供给消费者的智驾服务价格更加亲民甚至免费,二来“全国都能开”这种价值观的输送,也能一定程度上提升消费者对智驾的接受程度。
从发展的角度来看,当下中国新能源车市场智驾的竞争即将迈入下一个阶段,尤其是高速高架的竞争已经基本结束。当智驾从封闭路段来到开放路段,除了对技术能力提出更高要求外,不容忽视的还有成本的考量。
所以我们可以从极越和大疆车载上见到两种全新的思路,或是通过和地图供应商的深度合作和 AI 赋能实现纯视觉的完整高阶智驾,或是通过替代品传感器的应用来降低智驾实现成本。
除此之外,刚刚发布的小米 SU7(参数丨图片)也做好了两手准备,推出了分别基于激光雷达和基于纯视觉的两套方案。不久前长城也公布了他们城区 NOA 的测试视频,当更多的电动车企业着手于提升智驾能力,推动“智驾全国都能开”落地,我相信智驾距离成为新能源车购车意向第一因素已经不再遥远。
从另一个角度来看,市面上已经出现如此多的完整智驾实现方案,如果到今年下半年还有车企拿不出可用、可靠的解决方案,很有会导致品牌口碑崩盘。无需忌讳,比亚迪、极氪等车企的城区智驾仍未正式开放,智己的智驾能力也遥遥无期,这些都是危险的信号。智驾能力的不足会不会成为改变市场格局的变数,今年下半年将会揭晓答案。